Theory of the 7th axis:
Robot applications in production are a key step to improve efficiency and repeatability. Where can we move from here? Most robots on the production line are in fixed locations, they sit and operate their whole life cycle in the operational radius of their reach.
Limited to what is delivered to their place of work, some robots are so optimized for their task they produce and function faster than the rest of the chain can keep up. This will result in toggling down the rate at which materials for production are delivered to the robot. Now the seed for the 7th axis is planted.
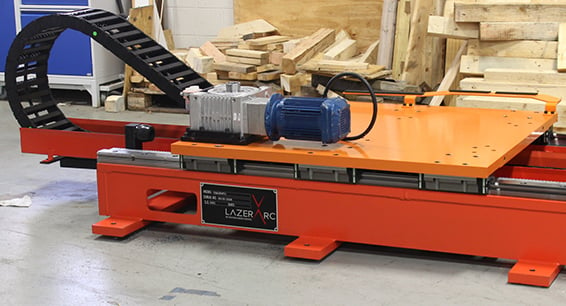
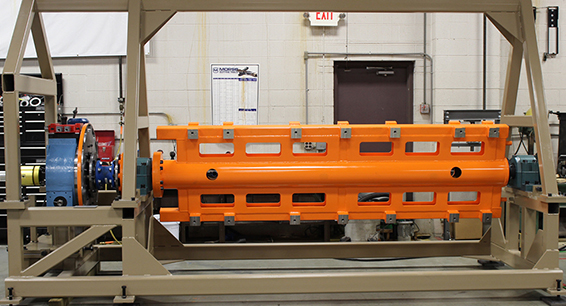
What if you can use that one robot to complete two or three tasks in various locations along different lines of assembly? This is possible with the implementation of a Linear Transfer Unit system. Compatible and customizable with any system and production process, the addition of a track that a robot is able to move up and down on yields growth in efficiencies and reduction in capital investment.
Considerations:
Load
What a robot can do is not often limited in application or usability, more so in its capacity to handle components with great weight. Much like any tool a robot is designed to handle a specific load capacity and its operation must not exceed such a value. This value is often greatly increased by implementing Cartesian or Gantry robots, that have a much greater support structure, limited cantilevered components, and fewer stress concentrations. Such robots benefit massively by adding a 7th axis. Having the robot mounted on a platform that can move increases its usability at multiple points of the production line. The additional translational axis allows for easy movement of otherwise trickier loads to handle.
Orientation
A key design component is the orientation of the robot and what the robot is working on. If components are small or space is tight a cartesian system may not be ideal with its bulkier framework, and a smaller robot such as a SCARA may be ideal. In anycase, the versatility that a 7th axis provides allows for increased range and manipulation to allow for the perfect fit.
Speed
In any manufacturing process, speed and repeatability are king. How much can you produce in a given amount of time? A massive question is how do you optimize any production line without sacrificing safety. Does it mean to have every robot operating at maximum capacity? Would maximum capacity result in bottlenecking along the assembly line? One solution might be to construct a process with fewer robots doing more tasks. If you need welding in multiple locations along the assembly line, is it ideal to have one robot doing the same task at each location, especially if they aren’t functioning at their capacity. With a single robot dedicated to welding, for example, attached to a Linear Transfer Unit you remove the need for multiple robots and reduce upfront capital investment. The ability of that robot to move back and forth operating in multiple positions on the line will require a specially designed production line. However, if that plan is cheaper than having multiple units, and the end result is faster than multiple robots, the ideal situation has been met. As long as the addition of this axis does not sacrifice in repeatability.
Accuracy
Robots are used in many manufacturing processes for the sole purpose that they can be programmed to do the same task, with great accuracy and precision, for their entire life cycle. These robots are typically fixed in a location and as a result their calibration is never lost in transit. It moves the part from A to B and then welds for example. What happens when you add a system such as a Linear Transfer Unit that changes the location of the robot, won’t the coordinates the robot operates on change with that motion upon return? This is their biggest challenge but each system is designed specifically for that task to reach the tolerance levels necessary for the same repeatability of a fixed robot. This is done in a variety of means but often by the implementation of a rack and pinion set. This system allows for a precise rotation of the pinion, keeping track of the pinion rotation correlates to a linear distance the rack has traveled. With this knowledge and tolerance specification, a certain setup with various tooth counts allows for accuracy and repeatability.
Environment
When you need to haul a trailer, you don’t use a sedan, you use a truck that is built to be able to move that type of load. Similarly, in robot applications and 7th axis design, one can not create a universal unit as every application for that robot is often vastly different. Each system needs to be designed for its working environment and account for possible hazards in its working space. As stated previously, for smaller and lighter loads SCARA robots are often optimal as they often meet the requirements for that production. Whereas for larger and heavier loads a cartesian system may be more desirable. The type of robot desired is not only limited to space and load available. The task that the robot needs to perform is just as important, if a box is supplied to a robot with the components it needs for the task, can it reach into the box, locate and obtain the component. With all these factors going into what Robot is desired, the ideal part of a Linear Transfer Unit is that it is able to be designed for any robot at various scales to effectively increase the robots radius of operation.
Other Robot Transfer Unit Synonyms:
Robot Transport Unit
Linear Transfer System
Transfer Robot
Linear Transfer Automation
7th Axis Robot
Robot Transfer Unit
Linear Motion Track
Robot Positioning Track
Robot Slide
Robot Transfer Shuttle
RTU
To learn more about these systems, see our Guide to Linear Transfer Units and RTUs here.